- 您现在的位置:买卖IC网 > Sheet目录450 > ISL5216EVAL1 (Intersil)EVALUATION BOARD FOR ISL5216KI
�� �
�
�ISL5216�
�The� loop� gain� mantissas� and� exponents� are� set� in� IWA�
�register� *010h,� with� IWA� register� *013h� selecting� loop� gain� 0�
�or� 1� and� the� settling� mode.�
�In� the� ISL5216,� a� SYNCI� signal� will� clear� the� AGC� loop� filter�
�accumulator� if� GWA� register� F802h� bit� 27� is� set.� This� sets�
�the� AGC� to� unity� gain� or� to� the� lower� gain� limit� (IWA� *011h�
�bits� 15:0)� if� it� is� larger� than� unity.�
�The� settling� mode� of� the� AGC� forces� either� the� mean� or� the�
�median� of� the� signal� magnitude� error� to� zero,� as� selected� by�
�IWA� register� *013h� bit� 8.� For� mean� mode,� the� gain� error� is�
�scaled� and� used� to� adjust� the� gain� up� or� down.� This�
�proportional� scaling� mode� causes� the� AGC� to� settle� to� the�
�final� gain� value� asymptotically.� This� AGC� settling� mode� is�
�preferred� in� many� applications� because� the� loop� gain�
�adjustments� get� smaller� and� smaller� as� the� loop� settles,�
�reducing� any� AM� distortion� caused� by� the� AGC.�
�With� this� AGC� settling� mode,� the� proportional� gain� error�
�causes� the� loop� to� settle� more� slowly� if� the� threshold� is�
�small.� This� is� because� the� maximum� value� of� the� threshold�
�minus� the� magnitude� is� smaller.� Also,� the� settling� can� be�
�asymmetric,� where� the� loop� may� settle� faster� for� “over�
�range”� signals� than� for� “under� range”� signals� (or� vice� versa).�
�In� some� applications,� such� as� burst� signals� or� TDMA� signals,�
�a� very� fast� settling� time� and/or� a� more� predictable� settling�
�time� is� desired.� The� AGC� may� be� turned� off� or� slowed� down�
�after� an� initial� AGC� settling� period.�
�The� median� mode� minimizes� the� settling� time.� This� mode�
�uses� a� fixed� gain� adjustment� with� only� the� direction� of� the�
�adjustment� controlled� by� the� gain� error.� This� makes� the�
�settling� time� independent� of� the� signal� level.�
�For� example,� if� the� loop� is� set� to� adjust� 0.5dB� per� output�
�In� the� median� mode,� the� maximum� gain� step� is�
�approximately� 3dB/output.� The� step� is� fixed� (it� does� not�
�decrease� as� the� error� decreases)� so� a� large� gain� will� cause�
�AM� on� the� output� at� least� that� large.� The� fixed� gain� step� is�
�set� by� the� programmable� AGC� loop� gain� register�
�IWA� *010h.�
�The� AGC� gain� limits� register� sets� the� minimum� and�
�maximum� limits� on� the� AGC� gain.� The� total� AGC� gain� range�
�is� 96dB,� but� only� a� portion� of� the� range� should� be� needed� for�
�most� applications.� For� example,� with� a� 16-bit� output� to� a�
�processor,� the� 16� bits� may� be� sufficient� for� all� but� 24dB� of�
�the� total� input� range� possible.� The� AGC� would� only� need� to�
�have� a� range� of� 24dB.� This� allows� faster� settling� and� the�
�AGC� would� be� at� its� maximum� gain� limit� except� when� a� high�
�power� signal� was� received.� The� AGC� may� be� disabled� by�
�setting� both� limits� to� the� same� value.�
�The� median� settling� mode� is� enabled� by� setting� IWA� register�
�*013h� bit� 8� to� 0� while� the� mean� loop� settling� mode� is�
�selected� by� setting� bit� 8� to� 1.�
�Cartesian� to� Polar� Converter�
�The� Cartesian� to� Polar� converter� computes� the� magnitude�
�and� phase� of� the� I/Q� vector.� The� I� and� Q� inputs� are� 24� bits�
�wide.� The� converter� phase� output� is� 18� bits� wide� and� is�
�routed� to� the� output� formatter� and� frequency� discriminator.�
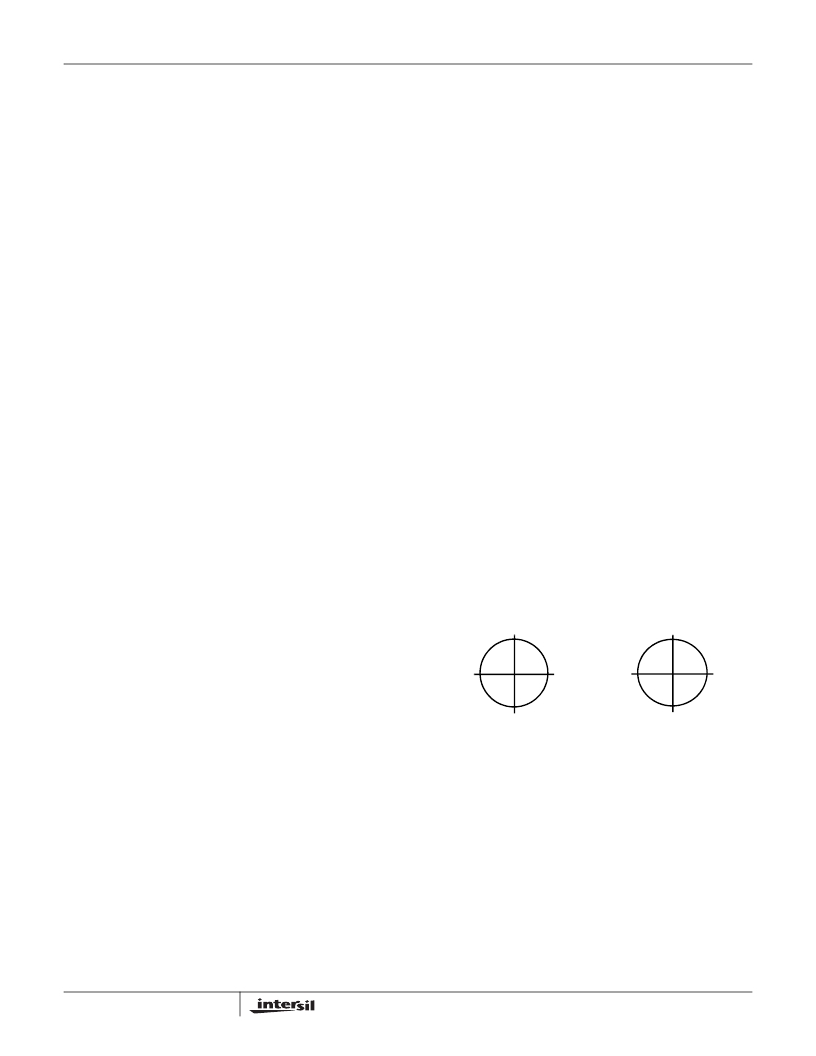
�This� 18-bit� output� phase� can� be� interpreted� either� as� two’s�
�complement� (-0.5� to� approximately� 0.5)� or� unsigned� (0.0� to�
�approximately� 1.0),� as� shown� in� Figure� 5.� The� phase�
�conversion� gain� is� 1/2� π� .� The� 24-bit� magnitude� is� unsigned�
�binary� format� with� a� range� from� 0� to� 2.32.� The� magnitude�
�conversion� gain� is� 1.64676.� The� MSB� of� the� magnitude� (the�
�sign� bit)� is� always� zero.�
�sample,� the� loop� gain� can� slew� up� or� down� by� 16dB� in� 16�
�symbol� times,� assuming� a� 2-samples-per-symbol� output�
�+� π� /2�
�400000� 3fffff�
�Q�
�π� /2�
�400000� 3fffff�
�Q�
�sample� rate.� This� is� called� a� median� settling� mode� because�
�the� loop� settles� to� where� there� is� an� equal� number� of�
�magnitude� samples� above� and� below� the� threshold.� The�
�7fffff�
�±� π�
�800000�
�I� 000000�
�0�
�ffffff�
�7fffff�
�π�
�800000�
�I�
�000000�
�0�
�ffffff�
�disadvantage� of� this� mode� is� that� the� loop� will� have� a� wander�
�(dither)� equal� to� the� programmed� step� size.� For� this� reason,�
�bfffff� c00000�
�-� π� /2�
�bfffff� c00000�
�3� π� /2�
�it� is� advisable� to� set� one� loop� gain� for� fast� settling� at� the�
�beginning� of� the� burst� and� the� second� loop� gain� for� small�
�adjustments� during� tracking.�
�26�
�FIGURE� 5.� PHASE� BIT� MAPPING� OF� COORDINATE�
�CONVERTER� OUTPUT�
�FN6013.3�
�July� 13,� 2007�
�发布紧急采购,3分钟左右您将得到回复。
相关PDF资料
ISL5217EVAL1
EVALUATION BOARD FOR ISL5217KI
ISL5239EVAL1
EVALUATION BOARD FOR ISL5239
ISL5239KIZ
IC LINEARIZER PRE-DISTORT 196BGA
ISL5416EVAL1
EVALUATION PLATFORM FOR ISL5416
ISL55005IEZ-T7
IC AMP MMIC BIPO BROADBND SC70-6
ISL55007IEZ-T7
IC AMP MMIC BIPO BROADBND SC70-6
ISL55008IEZ-T7
IC AMP MMIC BIPO BROADBND SC70-6
ISL55009IEZ-T7
IC AMP MMIC BIPO BROADBND SC70-6
相关代理商/技术参数
ISL5216KI
功能描述:上下转换器 QUAD DIGITAL DOWNCONVERTER,IND TEMP,0.8M RoHS:否 制造商:Texas Instruments 产品:Down Converters 射频:52 MHz to 78 MHz 中频:300 MHz LO频率: 功率增益: P1dB: 工作电源电压:1.8 V, 3.3 V 工作电源电流:120 mA 最大功率耗散:1 W 最大工作温度:+ 85 C 安装风格:SMD/SMT 封装 / 箱体:PQFP-128
ISL5216KI-1
功能描述:上下转换器 QUAD DIGITAL DOWNCONVERTER,IND TEMP,1.OMM PITCH BGA PACKAG RoHS:否 制造商:Texas Instruments 产品:Down Converters 射频:52 MHz to 78 MHz 中频:300 MHz LO频率: 功率增益: P1dB: 工作电源电压:1.8 V, 3.3 V 工作电源电流:120 mA 最大功率耗散:1 W 最大工作温度:+ 85 C 安装风格:SMD/SMT 封装 / 箱体:PQFP-128
ISL5216KI-1Z
功能描述:上下转换器 W/ANL QD DIG DWNCNVRTR 1 OM PITCH RoHS:否 制造商:Texas Instruments 产品:Down Converters 射频:52 MHz to 78 MHz 中频:300 MHz LO频率: 功率增益: P1dB: 工作电源电压:1.8 V, 3.3 V 工作电源电流:120 mA 最大功率耗散:1 W 最大工作温度:+ 85 C 安装风格:SMD/SMT 封装 / 箱体:PQFP-128
ISL5216KIZ
功能描述:上下转换器 W/ANNEAL QD DIGTL DWNCNVRTR IND TEMP RoHS:否 制造商:Texas Instruments 产品:Down Converters 射频:52 MHz to 78 MHz 中频:300 MHz LO频率: 功率增益: P1dB: 工作电源电压:1.8 V, 3.3 V 工作电源电流:120 mA 最大功率耗散:1 W 最大工作温度:+ 85 C 安装风格:SMD/SMT 封装 / 箱体:PQFP-128
ISL5217
制造商:INTERSIL 制造商全称:Intersil Corporation 功能描述:Quad Programmable Up Converter
ISL5217_05
制造商:INTERSIL 制造商全称:Intersil Corporation 功能描述:Quad Programmable Up Converter
ISL5217EVAL1
功能描述:EVALUATION BOARD FOR ISL5217KI RoHS:是 类别:RF/IF 和 RFID >> RF 评估和开发套件,板 系列:- 标准包装:1 系列:- 类型:GPS 接收器 频率:1575MHz 适用于相关产品:- 已供物品:模块 其它名称:SER3796
ISL5217KI
功能描述:上下转换器 196BGA,-40+85C PROGRAMMABLE QUAD UP CONVERTER RoHS:否 制造商:Texas Instruments 产品:Down Converters 射频:52 MHz to 78 MHz 中频:300 MHz LO频率: 功率增益: P1dB: 工作电源电压:1.8 V, 3.3 V 工作电源电流:120 mA 最大功率耗散:1 W 最大工作温度:+ 85 C 安装风格:SMD/SMT 封装 / 箱体:PQFP-128